Robot: Dagger
Written on February 16th, 2023 by SVISA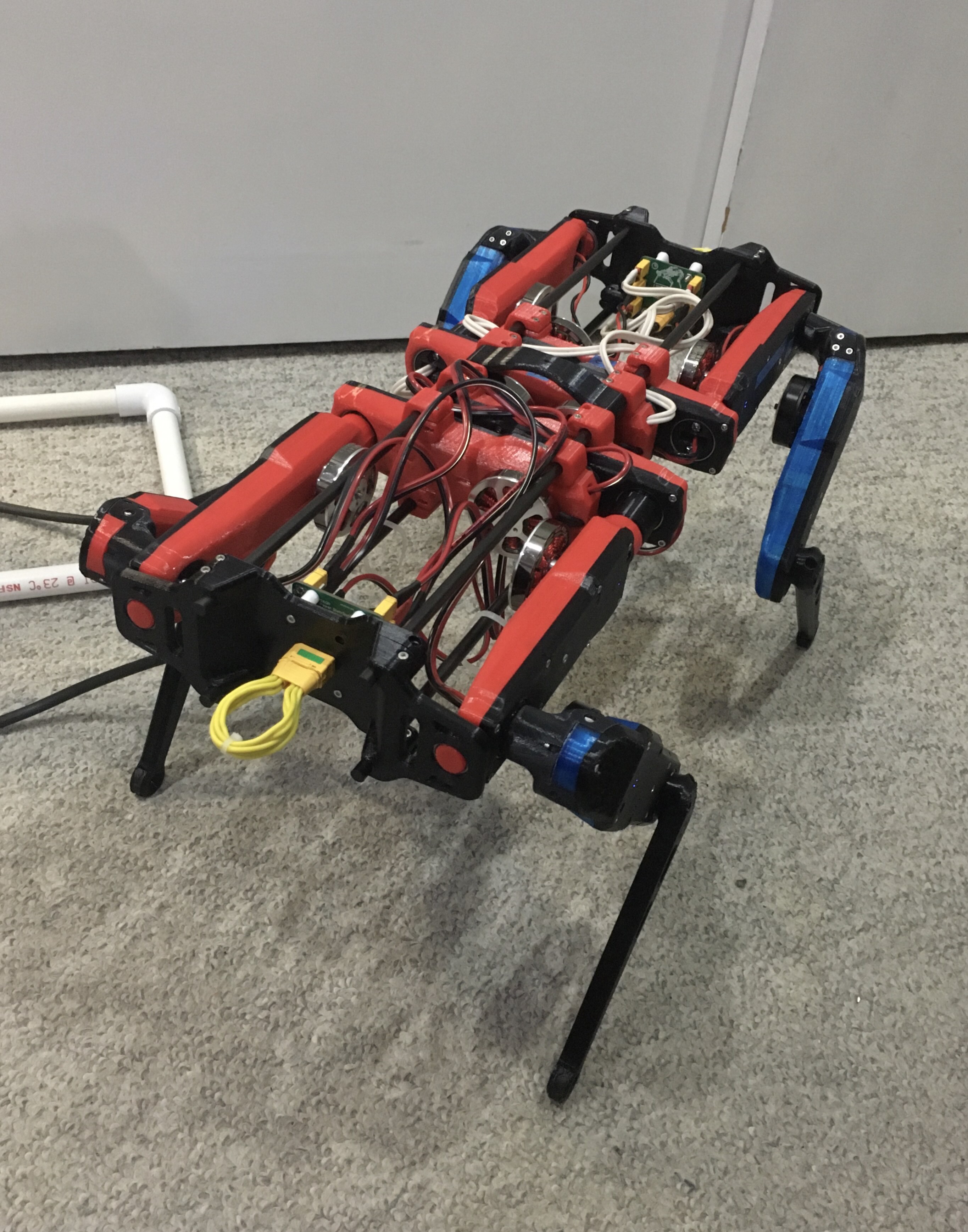
Dagger

Dagger
Quadruped robot built with brushless motors and compliant actuators. Complete design from motor controllers, mechanical design, kinematics by me. There robot also has no brains on-board. Only power distribution, position commands are sent wirelessly to each actuator. Here’s my blog about it: https://www.dagor.dev/blog/quadruped-robot
Feel free to share!